Geschwindigkeitseinstellung, zunächst praktisch und einfach...

Aufgrund Bauarten und Fertigsstreuungen der
verwendeten Teile ergeben sich unterschiedliche
Geschwindigkeiten der Modelle. Dies stört den
Verkehr bisweilen mehr, als es ihn fließen lässt.
Daher habe ich mal im Internet nachgesehen,
aber nichts einfaches, brauchbares gefunden,
zumal ein kleiner Unterschied auch i. O ist.
Die Geschwindigkeitsmessung haben wir bei
Fleischmann abgeschaut und auf einen Wiking -
Anhänger montiert. Anfangs haben wir Festwi -
derstände von 5 bis 12 Ohm, je nach Raddurch -
messer für 64km/h bein neu geladenen Akku's
eingebaut, diese fällt auf ca. 58 km/h nach einiger
Zeit zurück. Geht aber nur mit "großen" Zugfahr-
zeugen, also LKW! Siehe auch Testwagen.

Links und rechts je ein Vorderachsdrehgestell
für Wiking und Herpa-Zugfahrzeuge, mitte ein Zughaken mit angeklebtem Magnet und Gegen - magnet zum Anhängen an ein Fahrzeug ohne Zughaken/Kupplung.

Wie es funktioniert:
In der Mitte der Hinterachse sitzt ein Rad, in
das ein kleiner Magnet außen eingelassen ist,
darüber (unter dem Pritschenboden) ein kleiner Reedkontakt.
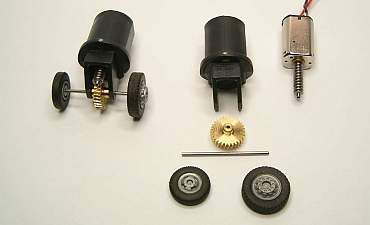
Motorhalter mit großer Untersetzung, 1:30 und
verschiedenen Rädern

Den Halter mit dem zu verbauenden Rad bei lau -
fendem Motor unter die Hinterachse halten, so
kann der benötigte Widerstand ermittelt werden.
Flachmotor glänzend 12,6mm Rad 69km/h, 10,2mm Rad 59km/h, Rundmotor d 10mm 12,6mm Rad 75km/h.
bei 2,4 Volt ohne Widerstand

Angehängt zeigt der Tacho beim Fahren die Ge - schwindigkeit, die sich in Kurven und Steigungen
natürlich verringert (und sich die Stromaufnahme
erhöht).
Bei der sehr großen Musumsanlage haben wir die Geschwindigkeit auf 55 bis 60 km/h eingstellt.
Mittlerweile stelle ich die Geschwindigkeit auf
ca. 50 km/h ein, es sieht nicht gut aus, wenn ein
großer LKW-Zug zu schnell durch enge Straßen
und Kurven "hetzt".
Auf die Spitze getrieben und aufgerüstet 2022:

Fahrradtachos zeigen nur bis 99,9 km/h

der Motorradtacho bis 399 km/h.
(Für manche Bugattis in 1:1 NICHT ausreichend).

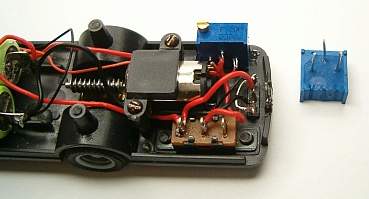
Links ein Batteriekasten zur Spannungsversor -
gung des Testers, wie beim Hänger jede Achse
mit eigenem Reedkontakt. Die Schalter unter -
brechen die Spannung vom Tacho zum Reedkon -
takt, damit die interne Batterie nicht unnötig be -
lastet wird. Bei Nutzung einer Achse lässt sich
das Einschalten des anderen Tachos kaum ver -
hindern, die haben eine recht lange Anzeigezeit.
Der Fahrradtacho benötigt 3 Signale und zeigt ab
5 km/h an, der Motoradtacho legt bei 2 los und
zeigt allerdings ab 10 km/h an.
Bei 57 km/h an der Antriebsachse, gemessen mit
einem preiswerten Laserdrehzahlmesser, zeigt der
330 U/min an, entspricht einer Fahrstrecke von
12m.

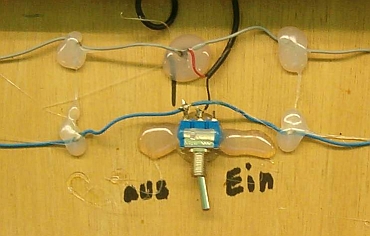
Die mittige Halterung ist für das Testen der Mo - toren, über die Messgeräte sind die Werte von Spannung und Strom abzulesen.

Mit dem Drehknopf rechts wird über ein Poten -
tiometer die Spannung geregelt und damit die
Drehzahl/Geschwindigkeit eingestellt.
Am Kabel dahinter kann der eingestellte Wider -
stand gemessen werden.

Und - am schnellen Tacho kann die Motordreh -
zahl als Geschwindigkeit direkt an der Welle
abgenommen und mit der Spannung 1,2 oder
2,4 Volt getestet werden.
Mit dem 1,2 Volt SolExpert-Motor ca. 156,
2,4 Volt Motoren bis 180 km/h.
Für Ende 2022 ist eine modernerer Teststand mit Display, darin angezeigten großem Tacho und Program-
mierfähigkeit für die Steuerung der im Fahrzeug eingebauten Elektronik angekündigt. Da soll vieles mach -
bar sein.

Auch die Motorhalter haben beidseitig gleich -
große Räder, im mittleren steckt eine Hülse für
8mm Motoren, der rechte ist offen, da der Rund -
motor einen etwas größeren Durchmesser hat.
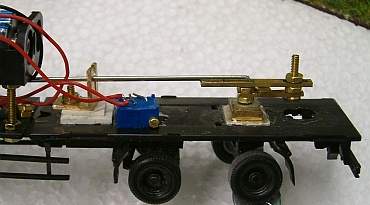
Auch der Anhänger ist umgerüstet:

Nur noch zum Ziehen:
2. Drehgestell aus der Bastelkiste, Zuggabel mit
kleiner Öse (und Schalter Tacho wie oben).
Der Anhänger wiegt betriebsbereit 40g, doppelt
so viel wie ein Hänger mit 450er Akku, gegen -
über Teststation ohne Belastung Unterschied zum
Fahrbetrieb 5km/h weniger.

Leichter rollende Wiking - Einzelräder, die
sind härter und haben weniger Rollwider-
stand, der kaum messbar ist, grins...

Der Rundmotor geht früher bei viel Fahrbetrieb
als der Flachmotor bei Bergauffahrt in die Knie.
War übrigens Bild Nr. 9999 für fcsfm, wobei
mindestens 3, selten auch mal 10 für eine ver -
wendete Aufnahme geschossen werden.
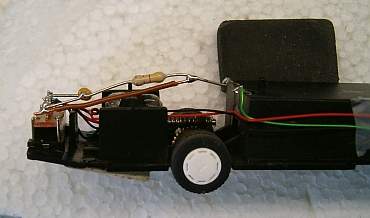
Widerstand, von den Akkus kommend, über -
brückt (braunes Kabel). Jetzt geht wieder
schneller bergauf.
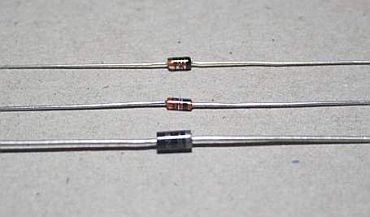
Statt eines Widerstandes sind Dioden bei 2,4 Volt einsetzbar, Geschwindigkeit mit 30erFaller-Zahn -
rad und großen Rädern ca. 54 km/h mit Schottky
0,2 V.
Oben bis 100mA, Anschlussdraht 0,38mm,
mitte bis 300mA, A -Draht 0,55mm,
unten 1A-Standard, A-Draht 0,77mm.

Die Zwischenstecker mit 1A Dioden sind für mei-
nen Testwagen zum Tauschen zur Ermittlung der Geschwindigkeit im Fahrbetrieb. Oben Schottky
mit 0,2, mitte Standard mit 0,7 und unten 2 x mit
1,4 Volt Spannungsabfall.
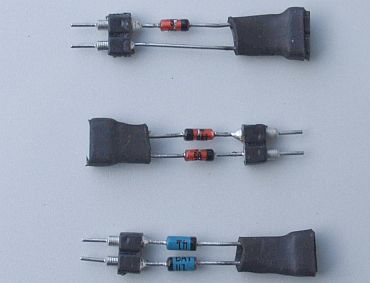
Die obere Schottkydiode BAT85 verringert die
Spannung um 0,4 Volt,
2 orange 1N4148 200mA oder 2 blaue BAT 41 300mA verkleineren um 1,7 Volt.
Ein blockierter Motor zieht aber 350mA...
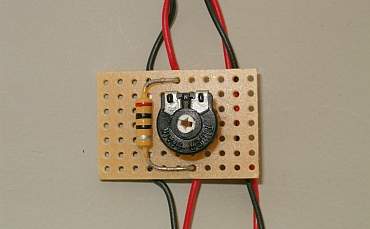
Ermittelt wird der passende Festwiderstand mit
dieser Platine, ein kleiner einstellbarer Wider -
stand mit 20 Ohm war in Karlsruhe nicht aufzu -
treiben. Der Wert des verwendeten war größer,
daher die Paralellschaltung eines festen Wider -
standes nach der Formel R x R geteilt durch
R + R = Gesamtwiderstand kleiner als der
kleinster Einzelwiderstand.
So konnte durch Verstellen der passende Wider -
stand ermittelt werden, der erfahrungsgemäß
zwischen 5 und 12 Ohm liegt. Siliziumdioden
haben einen Spannungsabfall in Durchlassrich -
tung von 0,7 Volt, Schottky-Dioden 0,2 Volt im
Betrieb - ausprobieren.
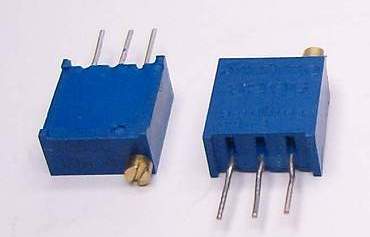
Hier einstellbare Präzisionswiderstände stehend, 20 Ohm ausreichend (auch größer erhältlich),
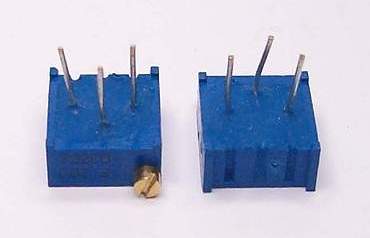
hier liegend, die auch stehend zu verwenden sind.
Bezugsquelle Reichelt-Elektronik,
64W20 stehend, 64P20 liegend.
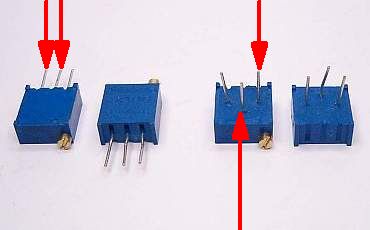
Angeschlossen wird der mittlere Stift und einer der
äußeren. Mit Anschluss des linken oder rechten
Stiftes ändert sich die Drehrichtung und damit der
Widerstandswert nach unten oder oben.
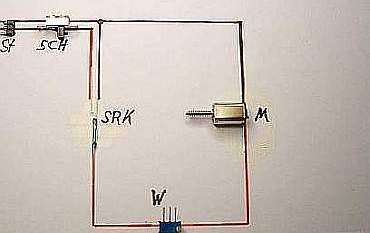
Der Anschlussplan:
Links oben St - Stecker, SCH - Schalter,
dann SRK - (Umschalt ) Reedkontakt,
W - Widerstand, M - Motor.
Der einstellbare Widerstand gleicht die Über - gangswiderstände von Stecker, Schalter und Reedkontakt mit aus.
Der Masseanschluss am Reedkontakt ist nicht
mehr erforderlich.
Hinten im Bus,

vorne im Tankaufbau,
mittig beim Sattel.

Postbus mit kleinen Rädern ohne Last 62

angehängt noch 55 Stundenkilometer.

Bus mit großen Rädern ohne Last 72

angehängt noch 66 Stundenkilometer,
beide mit Flachmotor glänzend.

Wie an den nachfolgenden Bildern und dem Text
zu entnehmen ist, bleibt der Anhänger die ein - facher zu bauende Lösung. Der Gummiring er -
setzt den Zughaken und passt sich der Fahrzeug -
länge an.
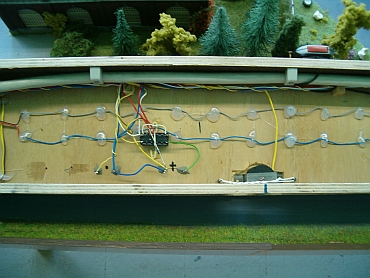
Sehr genau wie Kollege Hans E. war, hat er
eine Teststrecke gebaut, und dabei festge -
stellt, dass erst ab dem Überfahren von SRK
Nr. 1 bis 9 sein verwendeter Tacho mit dem Anzeigen beginnt.

Also sind beim Abstand von 39mm (12,5mm Rad
mit eingesetztem Magnet x 3,14) 16 Reedkon -
takte (heiß) eingeklebt,
mit Schalter für die Stoppstelle.

Der Oldie bringt es auf 28,

die "Vorführer" unter der Woche auf 58

und 66,

aber dann Akku fast leer nur 17,

noch warmer, da frisch geladener Akku 123,

nach einer Viertelstunde noch 82 km/h.

Fehlmessung!